《复杂环境作业装备非平稳非均布重载智能平衡控制技术、系统及应用》由西南科技大学等单位完成。
该项目研究非平稳非均布冲击载荷智能平衡控制,用于增强自主作业装备对非结构路况复杂环境的适应性,提高装备战技性能。提出了1种主动激励减振智能平衡控制理论与方法:提取振动信号特征,根据电气响应和机械响应的滞后时间差计算控制提前量,精确实施同频反相主动激励,达到快速削减振动幅度的目的。开展基于核函数理论的智能平衡控制技术研究,解决了装备在非结构路况承受持续非平稳冲击载荷的平稳行驶问题。研究LQR-ABC-SVM智能平衡控制技术,有效提高了装备复位时间,控制了弹着点分布离散度,解决了装备承受瞬时高强度冲击载荷的系统快速复位与平衡控制问题。
该项目获授权知识产权39项、出版学术专著3部、发表论文100余篇。研制的XX型号自行速射迫击炮、XX型轮腿式自主作业挖掘机器人等5种代表性装备形成产业化,近3年直接经济效益6.95亿元。为军民融合国家战略的深入实施和发展作出了探索性贡献,为我省“5+1”万亿级现代产业体系提供支撑,助推我省和西部地区经济建设发展。
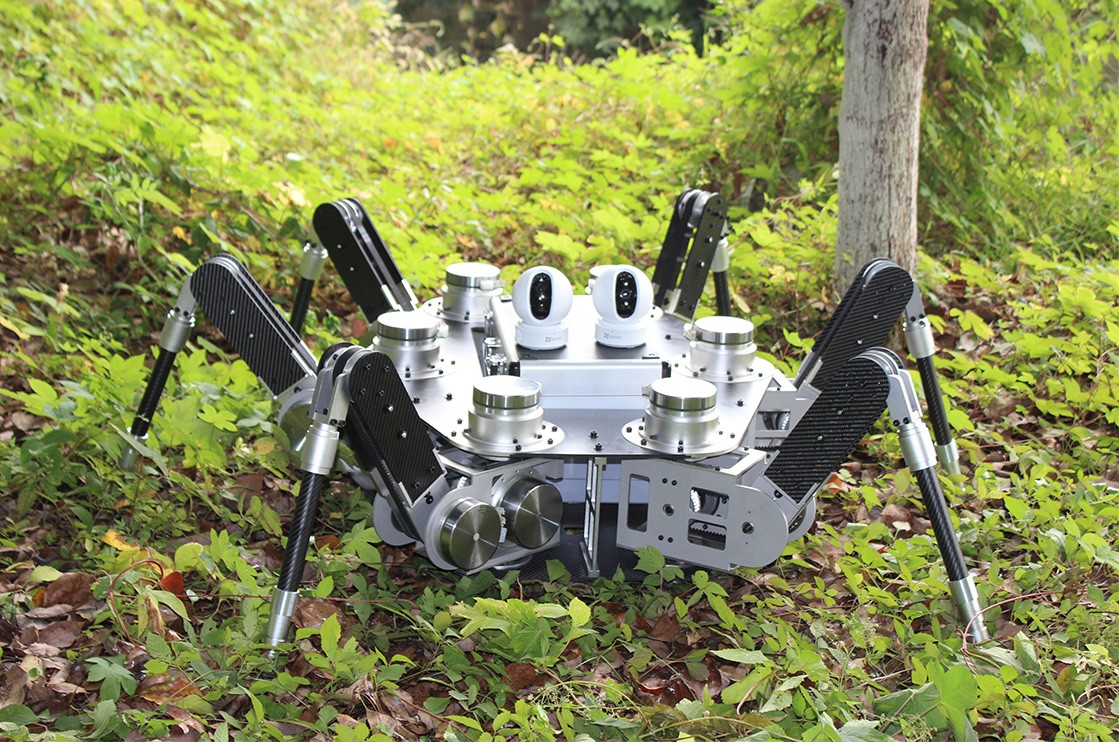
图1:成果应用于多功能足式机器人

图2:成果应用于某型重大仪器多功能承载系统